Eksisterende løsninger og potensial for automatisk overvåking av kraftnettet er omtalt i denne artikkelen, skrevet av Jonas Nystad, vitenskapelig assistent ved UiT i Narvik, sommeren 2019.
Introduksjon
Det finnes per dags dato ingen standarder for lading av små elektriske fartøy. Den vanligste løsningen er å forsyne lading via en vanlig industristandard trefasekabel fra land og ombord i fartøyet. Det er ikke en optimal løsning, men den fungerer. Hvis det skal satses på mindre elektriske fartøy er det viktig at det kommer en driftssikker og pålitelig ladeløsning på plass. Systemet i havnen eller på kai må være gjennomtenkt, og det bør være integrert med øvrig strømnett. Dette innebærer diagnostikk og overvåking av nettet, hvor man i sanntid har oversikt over lastflyt, eventuelle feil, og mulighet til å initiere strakstiltak ved feilsituasjoner, eller om etterspurt effekt er høyere enn nettet kan levere.
Det finnes allerede gode alternativ på markedet når det kommer til kommunikasjon mellom båt og ladestasjon, hvis man ser til elbil industrien. Utfordringen er å ta det neste steget å integrere automatisk kommunikasjon mellom ladeanlegg og strømnettet.
For større ferger og større skip med elektrisk og hybrid drift er det allerede etablert standarder for landstrøm og lading, og det er et pågående arbeid med å skape gode løsninger for å drifte slike fartøy. Det er et enormt fokus på å redusere utslipp fra transportsektoren, hvor majoriteten av varer og gods blir transportert via sjø. Cruisebåter bør også nevnes da disse båtene forurenser mye lokalt, gjerne konsentrert på spesielle steder.
Det er også stor velvilje i sjønæringen for å elektrifisere småbåter. Ett av problemene er at standardene rundt lading av små elektriske båter ikke er godt utviklet ennå. Derfor er tanken å se hva man kan lære av elbil industrien, og bruke løsninger som er velutprøvd og som i de siste årene har opplevd en enorm vekst.
Dagens nett og hensyn til øvrig nett
Elektrifiseringen av småbåter er en omfattende prosess fordi det omfatter mye mer enn kun båten. Med tradisjonelle framdrifts teknologier, som diesel, går et firma til innkjøp av båt og nødvendig infrastruktur for å drifte båten, som drivstofftank etc. Med elektriske båter kommer det flere aktører på banen, og man må spesielt sørge for at områdene hvor båtene skal driftes har tilstrekkelig tilførsel av elektrisk energi for lading.
Hvis flere båter som skal lade samtidig vil det kreve ganske stor effekt. Ta den helelektriske GMV Zero som eksempel. Den går nå (juli 2019) i prøvedrift som røkterbåt for oppdrettsnæringen. Denne båten lades ved industristandard trefasekabel og kontakt. Ladingen trekker ca. 2 x 87 kW, det tilsvarer 2 * 125 A ved 400 V. Om sjønæringen skal elektrifisere båtparken vil det være snakk om at flere tilsvarende båter skal lade samtidig. Når det blir normalt med elektriske båter til i sjønæringene snakker vi om store effekter ved hver havn hvor ladingen skal foregå. Det er derfor viktig at man får på plass smarte anlegg som kan «føle» på hvordan situasjonen i øvrig nett er og tilpasse ladingen deretter.
Mange av anleggene knyttet til sjønæringen er lokalisert på steder hvor strømforsyningen ikke nødvendigvis er robust. Derfor kan det i tillegg være lurt å vurdere lokal energilagring og energiproduksjon på disse stedene. For eksempel småskala vindturbiner og solceller i umiddelbar nærhet til kaien. Det har en høy investeringskostnad, men for nettselskapene sin del vil det være med på å bedre driftssituasjonen i nettet. Og for bedriften sin del vil det være et godt tiltak for kostnadsreduksjon om et eventuelt effektledd i energiprisen kommer. Og med tanke på reduserte driftskostnader i forhold til diesel drift så vil nok energilagring lønne seg.
Gjennomgang av sentrale temaer
Utfordringer ved “enkel lading”
Hvis tilkoblingen mellom båt og kai kun er en industristandard trefasekabel og stikk er det veldig begrenset i hvilken grad man kan kontrollere effekten. Batteriet vil da trekke den effekten det krever for å lade. I eksemplet over med GMV Zero vil det si ca. 184 kW per båt. Hvis omkrigliggende utstyr ikke er dimensjonert for en slik effekt vil utstyret kunne overopphetes og utløse respektive vern for å beskytte seg selv, og dermed sette en effektiv stopper for tilførselen. Det har blant annet vært tilfeller hvor større skip som kobler seg til landstrøm for å kunne slå av motorene når det ligger til kai, har mistet tilførselen fullstendig fordi strømmen har vært for stor for utstyret. Det skjedde fordi utstyret kuttet tilførselen for å beskytte seg selv.
Uten god kommunikasjon mellom utstyret på land og utstyret i båten vil dette kunne være en utfordring også for små fartøy. Det bør i det minste være mulighet til å kunne styre effekten til lading basert på hva som skjer i strømnettet.
Transformatorens rolle
I tillegg til å transformere spenningen i høyspentnettet ned, fungerer transformatoren som et galvanisk skille mellom strømnettet og den elektriske installasjonen til anlegget. Det er krav om galvanisk skille mellom øvrig nett og ladeanlegget. Et galvanisk skille betyr at to strømkretser er fysisk separerte, og kun koblet sammen magnetisk. Transformatoren overfører effekt via magnetfelt derfor er den å regne som et galvanisk skille. Dette bidrar bl.a. til å stoppe jordfeilstrømmer fordi de to kretsene (forsyningsnettet og kaien) er avskilt.
Spenningen transformeres fra nettspenning i regionalnettet, ned til 400 V. Spenningen i regionalnettet varierer i de forskjellige deler av Norge, men ligger typisk på 33 kV – 132 kV.
En lovende teknologi som det forskes mye på for tiden er Solid State Transformer (SST). Der er en komponent som allerede har begynt sitt inntog i markedet. Flere av de store konsernene arbeider med å gjøre SST til hyllevare. Derav navn som ABB, Siemens, Schneider Electric, GE med flere [1]. I fremtiden kan SST vise seg å erstatte den tradisjonelle lavfrekvente transformatoren (LFT), og samtidig føre med seg en rekke fordeler.
Kort forklart er det en transformator bestående av kraftelektronikk, hvor størrelsen på transformatorkjernen er kraftig redusert som fist i figur 1.
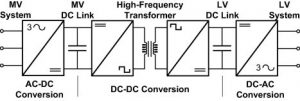
Figur 1 – Prinsippskisse for SST [1]
Per nå er vekten på en SST litt lavere enn en LFT, men den er fortsatt for tung til å plassere ombord på små fartøy [2], og den vil derfor være godt egnet hvis den plasseres på land. Størrelsen på transformatorkjernen kan reduseres fordi frekvensen i kjernen er økt fra nettfrekvens (50 Hz) og opp til flere kHz. Grunnleggende transformatorteori forklarer dette godt, vi kan ta en rask titt på transformatorlikningen er vist i
E = 4.44 * N * f * φmax,
der E er indusert spenning, N er forholdet mellom antall vindinger på primær og sekundær side, f er freksensen i transformatorkjernen og φmax er størrelsen på det magnetiske feltet.
Forholdet mellom frekvensen (f) og størres på magnetfeltet (φmax) er omvendt proporsjonalt. Det betyr for eksempel at hvis frekvensen i kjernen økes med en faktor på 200, kan jernkjernen reduseres med samme faktor. I tillegg til vesentlig reduksjon i størrelse, tilbyr en Solid State Transformer flere fordeler over tradisjonelle lavfrekvente transformatorer.
Hvilke muligheter kan SST tilby
Hvis man skal oppnå en økt grad av kontroll og diagnostikk i strømnettet, vil det å bytte ut tradisjonelle LFT med SST gi mange muligheter. Blant annet [3]:
- Isolering av feilstrømmer mellom primær og sekundær side
- Regulering av reaktiv effekt (gunstig i radialer og ved anlegg med lang overføring)
- Filtrering av støy fra primær til sekundær side og vice versa.
- Isolasjon av overharmoniske strømmer og spenninger
- Spenningsregulering, strømregulering på sekundærsiden og primærsiden (Effektregulering. Fjerner behovet for å trinne transformatoren)
- Mulighet for DC og AC samtidig på sekundærsiden
- Liten i størrelse, kan kanskje unngå egen trafokiosk
- Mulighet for avansert fjernstyring
- Fri for miljøskadelig olje
SST kan forsynes med 50 Hz AC fra strømnettet og gi ut både AC og DC i ønsket spenningsnivå på andre siden. På den måten er man i stand til å skille ladeanlegget fra øvrig forbruk i bedriften på forskjellige samleskinner. Hvor øvrig forbruk er koblet til en AC-samleskinne, og ladeanlegget en DC-samleskinne. Ved å koble ladeanlegget på DC reduserer man problematikk med jordfeilstrømmer, og man kan redusere antall omformerledd (AC/DC).
Det er enkelt å se at SST kan være en sentral komponent i arbeidet med å utvikle fremtidens strømnett og framdrifts systemer med økt integrering av fornybar energi. Det finnes løsninger med tanke på å integrere strømnettet og ladeanlegg som allerede er på markedet i dag, også ved å bruke den «vanlige» lavfrekvente transformatoren. Men det vil kreve ekstra utstyr og flere komponenter.
Kommunikasjon
Når man snakker om kommunikasjon menes det kommunikasjon mellom båt og ladestasjon, og mellom ladestasjon og strømnettet. For kommunikasjon mellom båt og ladestasjon finnes det allerede mange gode alternativer på markedet. For kommunikasjon mellom ladestasjon og strømnettet er ting litt vanskeligere. Samkjøringen og delegeringen mellom ladestasjonene kan for eksempel gjøres ved å benytte «WINSmartEV» – software basert overvåking og kontroll og styresystem for flere ladere på samme krets, systemer basert på CAN-bus eller liknende løsninger [4].
For trådløs kommunikasjon kan det være aktuelt å bruke følgende protokoller/standarder
- ZigBee wireless communication er en trådløs protokoll som er basert på IEEE 802.15.4 standarden. Den har lav overføringskapasitet, men er enkel, billig og pålitelig.
- Wifi – har både god rekkevidde og god kapasitet for dataoverføring
- 3G/4G/LTE – relativt velutbygd i Norge, og har god kapasitet for dataoverføring
Kommunikasjon via kabel kan gjøre på flere måter:
- PLC (Power Line Communication
- Dedikerte fysiske kommunikasjons kanaler integrert i ladekabelen
- HomePlug Green PHY – PLC
Integrering mellom ladeanlegg og strømnettet forskes mye på og mange løsninger er aktuelle [5]. For eksempel:
- Efficient XML Interchange (EXI), en standard som utvikles av ISO/IEC og bruker PLC (Power Line Communication)
- Samkjøring via dedikerte sendere som benytter 4G/LTE
- Dedikerte fiberoptiske kabler som knytter sammen transformatorstasjoner med ladeanlegg(ene)
Responstid og kapasitet på kommunikasjonen mellom båt og kai er ikke avgjørende for om man går for den ene eller den andre løsningen. Det har ingen konsekvenser om det tar ett eller ti sekunder før ladingen starter har ingen ting å si for driften av båtene.
Til å begynne med trenger man kanskje ikke veldig avansert kommunikasjon med nettet. Det kan være nok at nøkkelutstyr har oversikt over lastflyten og ledig kapasitet. Med det sørger man i det minste for å ikke overbelaste nettet. Om utstyret som kommuniserer med øvrig nett er forhåndsprogrammert med linjedata for nærliggende nett, så kan den regne ut hvor mye effekt som kan leveres ut ifra størrelsen på strømmen som flyter i nettet. Dette gir ingen smart regulering, men man sørger for å ha en god nok styring av lading med hensyn til øvrig nett.
Integrasjon med strømnettet
Uansett hvilken transformatorteknologi man velger, bør man ha en måte å vite hva som foregår i strømnettet, for å kunne kontrollere ladestasjonene med hensyn til strømnettet. Det er flere måter å gjøre dette på. En enkel og grei løsning kan være å plassere en kontroller ved hvert respektive anlegg som har blitt forhåndsprogrammert med linjedata fra nettet som forsyner transformatoren, og som i sanntid overvåker spenningen og strømflyten i linjen. På denne måten, ved å vite nettforsyningen strømbegrensning, kan kontrolleren anta hvor mye effekt ladeanlegget kan trekke uten at det skaper problemer. Kontrolleren sender signal videre til en stasjon som styrer og delegerer hvert enkelt ladepunkt, og delegerer effekt til de respektive båtene basert på prioritet og ladeeffekt.
Lysbue
Lysbue er et fenomen som kan oppstå i elektriske anlegg. Det kan forklares som en lysende, buet strømbane som går mellom to strømførende metaller gjennom luften. Lysbue er ekstremt farlig av mange grunner, men mest på grunn av den høye temperaturen som utvikles, som kan komme opp i flere tusen grader celsius [6].
Primært er det størst fare for lysbue hvis det oppstår feil i det elektriske anlegget, skader på kabelisolasjon etc. Og med tanke på at utstyret i mange tilfeller vil bli utsatt for hardt vær og mye tung bruk kan personell som opererer ladeustyret, spesielt ved til og fra kobling av ladekabel være utsatt for økt risiko ovenfor lysbue. Det er spesielt viktig å sikre at operasjon av utstyret gjøres sikkert. Det er størst fare for lysbue ved bruk av vanlig trefasekabel, hvor det eneste laget med beskyttelse er vernet som skal slukke lysbuen. Dedikert ladeutstyr vil ha flere lag med sikkerhet innebygd, både i vern, fysisk beskyttelse i utstyret, og i programvaren. Dette er nok en grunn til å bevege seg bort i fra tilkobling via vanlig trefase.
Spenningskvalitet
En viktig del med å styre strømnettet på en god måte er å sørge for god spenningskvalitet til enhver tid. Dette betyr bl.a. at spenningsnivået må være innenfor grenseverdiene. Hvis spenningen skulle øke eller synke for mye kan tilkoblet utstyr bli skadet.
En karakteristikk med strømnettet er at spenningen vil synke når belastningen øker, og øke når belastningen synker. Man har måter å styre dette på den dag i dag. Vanligvis er det nettselskapet som har kontroll på dette. Lange utstrakte overføringslinjer og avsidesliggende deler av nettet som ligger langt unna kraftverk er spesielt utsatt for utfordringer med spenningskvaliteten. Noe som vil være tilfelle for mange fremtidige ladeanlegg.
Ladeanlegg for båter vil være å anse som store elektriske laster. Et plutselig utfall av et større ladeanlegg vil føre til at spenningen øyeblikkelig stiger i omkringliggende nett. På samme måte vil spenningen synke om flere båter kobles til for lading samtidig. Derfor er det viktig at man får på plass gode verktøy for overvåkning og diagnostikk i ladeanleggene. Også her vil en Solid State Transformer kunne gi muligheter for kontroll som i dag krever annet utstyr. Hvis anleggene er store nok, og ligger langt fra nærmeste kraftverk vil det være gunstig å installere kondensatorbatterier og reaktorspoler ved anlegget. Disse to komponentene er sentral for å regulere spenningen i vekselstrøms nett.
Installere lokal energilagring
I situasjoner hvor nettet ikke er i stand til å levere ønsket effekt til lading kan en lokal batteribank forsyne anlegget, som kan lades sakte opp når båtene ikke ligger til kai. I tillegg kan lokal energiproduksjon lade opp batteribanken. Dette kan være solceller, eller små vindturbiner. Om sommeren når det er best grunnlag for utnyttelse av solenergi er også været roligst, og nettet er mindre belastet enn det er på vinterstid. Om vinteren når nettet er mest belastet blåser det mest. Da kan vindturbiner bidra til å lade enten båtene eller batteribanken.
Løsninger
Oversikt over forskjellige løsninger
Per dags dato finnes det ingen utbredt standard for ladeløsninger ved små havner eller små sjønæringsanlegg. «State of the art» ladeløsning i dag er tilkobling via en vanlig trefasekabel koblet rett i en trefase stikk. Dette medfører kontroll i veldig liten grad da det kun er lasten som avgjør ladeeffekten uten kommunikasjon med utstyr på land. Selv om denne løsningen fungerer for de få båtene som er i drift i dag, er denne måten å lade på ikke særlig skalerbar. For å kunne serve en flåte av elektriske fartøy er det nødvendig med en gjennomtenkt, standardisert og skalerbar løsning.
En mulig løsning kan se ut som følger. Hver båt bør utstyres med utstyr for å kommunisere med ladestyring på land, aller helst trådløst for å redusere vekt på ladekabel. Ladestasjonen kommuniserer med en sentral styring, som styrer og fordeler effekt og ladeprioritet for alle ladepunktene. Den sentrale styringen kommuniserer med en kommunikasjons-hub som har oversikt over driftssituasjonen i nærliggende strømnettet og kan bestemme hvor mye effekt som kan tildeles til lading.
Som reserveløsning må båten også ha flere måter å kommunisere med utstyr på land, hvis den trådløse kommunikasjonen (3G/4G/LTE/WIFI/ZigBee) skulle være ute av drift av hvilken som helst grunn. Hvis man for eksempel bruker CAN-bus som grunnstein [4], kan man samkjøre kommunikasjonen mellom forskjellige båter som er koblet til ladestasjonen trådløst og via kabel. Hvis trådløst utstyr svikter ombord, har man fortsatt mulighet å koble seg til via kabel, og fortsatt ha mulighet til å lade batteriene.
Gjennomgang av tre alternativer
Figur 2 viser en oversikt over tre forskjellige ladeløsninger.
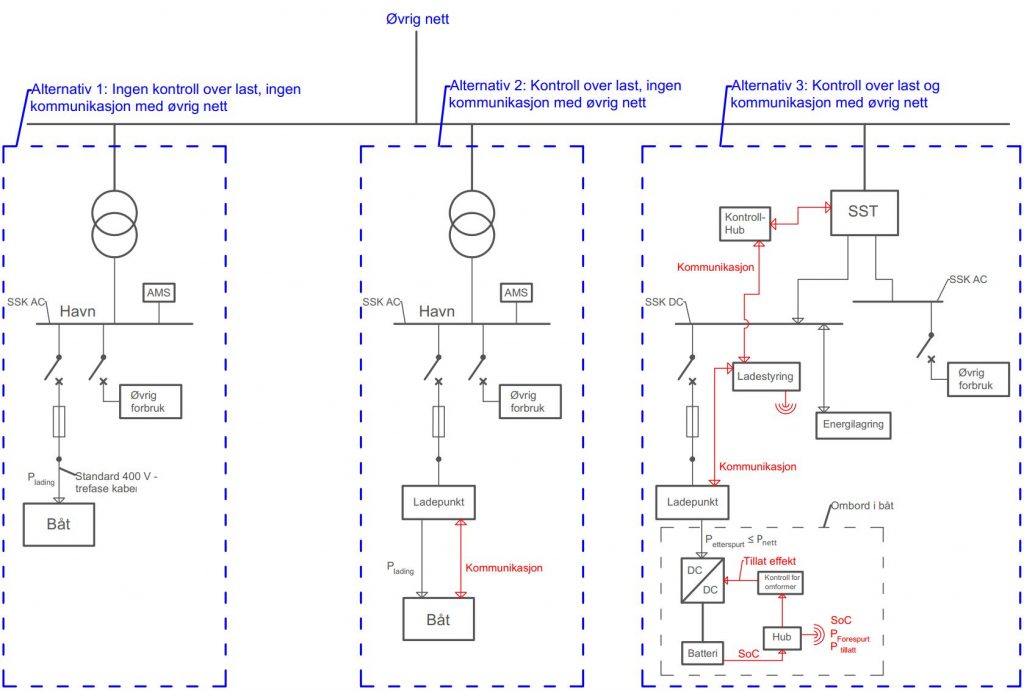
Figur 2 – Konseptskisse over forskjellige løsninger
Alternativ 1: Industristandard trefasekabel og stikk
Alternativ 1 beskriver et anlegg som har mulighet til å forsyne en båt med strøm via en vanlig industristandard trefasekabel og kontakt. Per dags dato (midten av 2019) er dette standard for de få båtene som blir drevet utelukkende av elektrisk framdrift. Denne løsningen er ikke ønskelig, ei heller smart å ta med videre. Det frarådes at nye anlegg vurderer denne måten å lade sine elektriske fartøy på. Den tilbyr lav eller ingen form for automatisk diagnostikk og kontroll, og kan være begrensende hvis det er flere båter som skal lade samtidig.
Alternativ 1 (illustrert i figur 2) beskriver en driftssituasjon hvor ladingen har en egen dedikert kurs med vern for overspenning, overstrøm, lysbue, og jordfeil. Forsyningen fra land til båten er en vanlig industristandard trefasekabel med spenningsnivå på 400 V, koblet i en trefase industristandard stikk. Effekten kan dimensjoneres etter behov. Men et potensielt problem med større effektoverføringer er tverrsnittet på kabelen, og følgelig vekt på kabelen.
Selv om man kan oppnå en relativt høy ladeeffekt, både enkelt og billig, er løsningen begrenset med tanke på kommunikasjon mellom lader og båt, og begrenset i form av hvor mye den kan utvides og oppgraderes. All styring og kontroll må eventuelt skje i systemene ombord i båten.
Erfaringer man har gjort ved bruk av denne løsningen sier at kabelen kan bli tung og krevende å operere for mannskapet når effekten på ladingen øker (vekten på kabelen blir høy).
AMS-målere kan utnyttes for å holde oversikt over effektbruken ved ladingen og på den måten gjør at nettselskapet har oversikt over driftssituasjonen, men det vil allikevel ikke gi særlig med kontroll over ladesituasjonen.
Alternativ 2: Bruke utstyr fra elbil industrien
Denne løsningen er inspirert av løsninger for elbil lading, som er en velutviklet og velutprøvd teknologi. Pluggen mellom kabel og båt bør minst være av type 2. Alternativ 2 beskriver et senario hvor dedikert utstyr for lading kan installeres i et eksisterende anlegg.
En LFT er koblet til nettet og transformerer spenningen ned fra respektiv spenning i regionalnettet, til 400 V. Transformatoren forsyner en samleskinne hvor resten av anlegget og ladekretsen er tilkoblet. Ladepunktene er utstyrt med nødvendig vern for jordfeil, lysbue, overspenning og overstrøm.
Båten og ladestasjonen kommuniserer med hverandre. Prosessen fungerer som følger:
- Kabelen kobles til båten.
- Ladestasjonen spenningssetter kabelen med en lav spenning (typisk 24 V) for å sjekke om alt fungerer som det skal. Ved å sjekke for jordfeil, lekkstrømmer etc. Hvis alt er ok gir ladestasjonen kontrollen over til båten.
- Båten gir informasjon til laderen om spenningsnivå i batteriet, SoC, og ønsket ladeeffekt.
- Ladingen starter.
- Det er kontinuerlig kommunikasjon mellom båt og ladestasjon, og båten justere konstant ladeeffekt for å bevare utstyr og batteri best mulig. Dette pågår til ladingen er ferdig
Kommunikasjonen kan gjøres på forskjellige måter, avhengende av hvilken type ladestasjon, kabel og kommunikasjonsprotokoll som benyttes. Det er ønskelig at all nødvendig kommunikasjon går gjennom samme kabel. Enten via PLC (Power Line Communication), eller egne dedikerte fysiske kommunikasjonskanaler i kabelen. CCS, type 2 & 3, og CHAdeMO tilbyr bl.a. denne muligheten. Både for enkelhet skyld og for å holde vekten på kabel så lav som mulig.
I og med at det er båten som styrer ladingen vil en båt kunne lade ved alle anlegg som har tilsvarende ladestasjoner tilgjengelig, altså båten vil ikke være bundet til sitt driftsområde. Bakdelen med dette alternativet er at det ikke er noen kommunikasjon med øvrig nett, og dermed ingen samkjøring mellom ladestasjonene nettet. Det vil være mulig å få til, men poenget er å illustrere hvordan en løsning av det enklere slaget vil se ut. Dette kan være et problem i områder som ikke har et sterkt forsyningsnett, og hvor strømforsyningen er begrenset. I og med at mange av industrianleggene til fiskenæringen ligger på avsidesliggende steder vil det være gunstig å ha en kommunikasjon med øvrig nett slik at effekten som leveres til laderne fra nettet hele tiden kan fordeles på best mulig måte. Kommunikasjon om driftssituasjon, eventuelle feil, og hvor «nettet» kan sette begrensninger for ladestasjonene.
Alternativ 3: Skreddersydd løsning
Alternativ 3 viser et anlegg hvor båten kommuniserer med ladestasjon. Ladestasjonen styres av en kontroll-hub som har oversikt over hvordan situasjonen i forsyningsnettet er til enhver tid. Som figur 2 viser, er all kommunikasjon mellom båten og ladestasjonen trådløs.
En kontroll HUB har til enhver tid oversikt over driftssituasjonen i øvrig nett, og dermed hvor mye effekt som er tilgjengelig. Kontroll HUB´en signaliserer ladestyringen om hvor mye effekt som totalt kan forsynes fra nettet, og videre delegerer ladestyringen effekt til de forskjellige båtene, hvor effekt til hver båt styres av prioritet ut ifra hva båten ønsker av effekt, og når båten gir signal om hvor raskt den trenger å lades opp.
Ved å bruke en Solid State Transformer (SST) i stedet for en tradisjonell lavfrekvent transformator (LFT) oppnår man en mye bedre kontroll og oversikt over anlegget. Samleskinne for øvrig forbruk og samleskinne for ladestasjonene er separert. Hvor de opererer på vekselstrøm og likestrøm respektivt. Tradisjonell LFT kan også brukes i stedet for SST. Dette vil dog kreve en del tilleggsutstyr. Prosessen er ganske lik som i alternativ 2, forskjellen er kommunikasjonen mellom utstyret. Den fungerer som følger:
- Ladekabelen kobles til båten
- Ladestasjonen spenningssetter kabelen med en lav spenning (typisk 24 V) for å sjekke om alt fungerer som det skal ved å sjekke for jordfeil, lekkstrømmer etc. Hvis alt er ok gir ladestasjonen kontrollen over til båten.
- Båten gir informasjon til ladestyringen om spenningsnivå i batteriet, SoC, ønsket ladeeffekt, og ønsket tidspunkt for full lading. Dette skjer trådløst. Eller via kabel hvis trådløst utstyr er satt ut av drift av hvilken som helst grunn
- Båten sender signal til ladestyringen om ønsket ladeeffekt. Ladestyringen forteller så ladestasjonen om hvor mye effekt båten kan bli tildelt. Denne kommunikasjonen foregår kontinuerlig
- Ladingen starter, og ladestasjonen justerer ladeeffekt ut ifra hva ladestyringen sier. Det er kontinuerlig kommunikasjon med ladestasjon gjennom hele ladeprosessen, og ladeeffekt justeres for å bevare utstyr og batteri best mulig
- Det er kontinuerlig kommunikasjon mellom ladestyring og kontroll-huben, hvor kontroll-huben hele tiden forteller ladestyringen om hvor mye total effekt som er tilgjengelig
- Ladestyringen fordeler ladeeffekt til forskjellige ladestajsonene basert på hvilken prioritet båten har gitt uttrykk for, og gjenstående ladetid.
Konklusjon
Elektriske fartøy er ennå på forskningsstadiet. De få båtene som er i drift nå, går som prøveprosjekter i oppdrettsnæringen. Disse prøvebåtene lades via en standard trefasekabel. For disse båtene fungerer dette greit, men det er all grunn til å tro at etterspørselen etter helelektriske småbåter vil ta av når prøvedriften har bevist at teknologien fungerer, og barnesykdommene har blitt luket ut. Før flåten av helelektriske båter kommer bør vi bli enige om løsninger for lading av fartøyene, og skape løsninger som er gunstige og pålitelige både for sjønæringen og for alle som er involvert i å drifte strømnettet som forsyner båtene med elektrisk energi.
Det eksisterer per dags dato liten form for automatisk diagnostikk og detalj-kontroll for laster i nettet. Derfor anbefales det at det som et minimum installeres dedikerte ladeløsninger som har kommunikasjon og kontroll mellom båt og ladepunkt. Og helst en komplett løsning som tilbyr fullstendig kontroll over lading med god automatisk kommunikasjon med øvrig forsyningsnett.
Referanser
[1] M. Insights. “Solid State Transformers (SST) Industry 2018 Market Research Report.” https://www.millioninsights.com/industry-reports/solid-state-smart-transformer-market?utm_source=blogging&utm_medium=referral&utm_campaign=weebly_rupali_9oct&utm_content=content (accessed 02.07.2019.
[2] G. Guerra and J. A. Martinez-Velasco, “A Solid State Transformer model for power flow calculations,” International Journal of Electrical Power & Energy Systems, vol. 89, pp. 40-51, 2017/07/01/ 2017, doi: https://doi.org/10.1016/j.ijepes.2017.01.005.
[3] N. Verma, N. Singh, and S. Yadav, “Solid State Transformer for Electrical System: Challenges and Solution,” in 2018 2nd International Conference on Electronics, Materials Engineering & Nano-Technology (IEMENTech), 4-5 May 2018 2018, pp. 1-5, doi: 10.1109/IEMENTECH.2018.8465315.
[4] A. Shepelev, C. Chung, C. Chi-Cheng, and R. Gadh, “Mesh network design for smart charging infrastructure and electric vehicle remote monitoring,” in 2013 International Conference on ICT Convergence (ICTC), 14-16 Oct. 2013 2013, pp. 250-255, doi: 10.1109/ICTC.2013.6675352.
[5] H. Gözde, M. C. Taplamacıoğlu, M. Arı, and H. Shalaf, “4G/LTE technology for smart grid communication infrastructure,” in 2015 3rd International Istanbul Smart Grid Congress and Fair (ICSG), 29-30 April 2015 2015, pp. 1-4, doi: 10.1109/SGCF.2015.7354914.
[6] S. N. Leksikon. “Elektrisk lysbue.” https://snl.no/elektrisk_lysbue (accessed 05.07.2019.


