Wireless charging is an interesting technology for electric ships. This literature review is written by Yousuf Adeel, research assistant with UiT in Narvik, summer 2019.
Definition & Working Principle
Charging a device by inducing current from one electric circuit into another via electromagnetic waves is referred to as induction charging or wireless charging.
Electromagnetic induction is of two types:
- Self Induction: By varying the magnetic field in a circuit if the current is induced in the same circuit, then the process is said to be self-induction. This self induced current is the source of electromotive force.
- Mutual Induction: By varying the magnetic field in a circuit if the current is induced in the neighboring circuit, the process is called mutual-induction. The circuits are not linked electrically but magnetically.
Wireless inductive charging is a phenomena of mutual induction. A sending induction coil is used to create an alternating electromagnetic field. A second induction coil responds to the variation in magnetic flux and converts it back into electric energy by translating magnetic flux to the changes in induced current. To manage longer distances between sender and receiver coils the inductive charging system uses resonant inductive coupling.

Figure 1 – Basic circuit for induction charging [1]
Here, Rp is the primary resistance modeled for resistive losses on primary side. Similarly Rs sums up for secondary losses in pick up circuit. In a purely ideal, lossless case, Rp = Rs = 0, where R is the load resistance.
When input voltage (Vp) is applied to the primary circuit, the flowing current (Ip) generates electromagnetic-field with a varying frequency ωp. This is the same frequency as that of the applied source voltage/current. IPT’s usually operate in the kHz−GHz range, which is one of the reasons frequency converters are used at sending end for making sure that the input current/voltage has the desired frequency. Being able to alter this frequency ωp, makes it possible to tune it to the primary circuits own frequency ωo. The circuit is allowed to operate at resonance frequency ω0 is mathematically defined as:
ωo = 1/√(LpCp).
Resonance frequency is the frequency at which RLC circuits exhibit no resistive losses. It means if the input power has a frequency that syncs with the resonant frequency then it will be transferred without any loss to the end of circuit. Same goes for pick up circuit if its ωs is tuned to ωo.
Scope of inductive charging
Primary advantage of induction charging for fully automated operations is due to the absence of physical electrical & mechanical interfaces; hence the possibility of wear and tear is ruled out. Moreover, as there is no physical electrical contact between the source (charging spot on shore) and the load (electric vessel), there are no leakage currents, corrosion in saline environments or any challenges related to snow or icing etc. Induction charging is safe and reliable and usually galvanic isolation is used to make both sides (source & load) communicate energy, preventing any accidental short circuit currents [4].
Finally, one of the main advantages is the possibility of transferring power without any mechanical connection procedure, allowing for better utilization of the limited docking time for battery charging. Solutions for inductive power transfer can be designed for immediately transferring power to the ship when it enters its position in the dock and until the moment when it starts its next trip.
Foreseeable Challenges
Wireless electric charging methodologies are currently designed for automobiles and smaller appliances but they’re applicable to electric vessels with slight modification. But still the field is rich in research and development for devising efficient strategies to overcome certain challenges faced in marine applications.
- Mutual inductance between transmitter and receiver coils must remain constant. In a real-time scenario, the free-floating motion of the electric vessel due to waves, wind and loading/unloading of freight may be challenging as the magnetic flux lines required to induce current in secondary side (vessel’s coil) may fluctuate depending upon the flux area.
- As compared to Inductive Power Transfer (IPT) in automobiles & small appliances, it requires high power transfer capacity to design the same for marine applications. Based on the work at KAIST, the Korea Railroad Research Institute has presented a design and a full-scale demonstration of a system with a 1 MW transmitter and parallel operation of multiple receiver units in the 200-kW range to obtain about 820-kW total power transfer capacity. IPT system for marine vessels require power in mega-Watts (currently developed around 1MW-2MW). [4]
- Coastal transportation systems (such as ferries) operate on fixed schedule with short docking times. So for effectively storing the charge in batteries, time should be properly utilized for effective energy storage capacity utilisation. The time required for connecting and disconnecting the power supply for conventional on-board battery charging will limit the energy transfer during docking. Direct electrical connection also causes challenges related to safety and reliability in harsh environments.
Possible Solutions to Challenges
The problem of inconsistent mutual induction and power transfer can be tolerated in two ways:
- By designing an electromechanical position control system for one of the two coils (either on transmitter side or receiver side).
- By incorporating tolerance in the circuit design for variations in the relative position. (This approach prevents the addition of complex & bulky power electronics and servo motors on-board or on-shore)
For the circuit presented in Figure 1, the output power is normally insufficient. A capacitor is added in the pickup/secondary side and circuit is operated in resonance with primary circuit. At resonance maximum output power is given by:
Po = ωI2p (M2/L2)Q,
where ω = 2πf is the operating frequency, Ip is the primary circuit current, M is mutal inductance in Henry, L2 is induction of the secondary circuit and Q is tuned quality factor.
The term mutual inductance is defined in terms of coupling coefficient (k) which describes the state of inductive coupling between two coils:
M = k√(LpLs).
Here ‘k’ will have a value between 0 – 1 (often expressed as %). Its value is dependent on the relative distance and orientation between two coils. The detailed analysis is presented in [1]. In Figure 2, possible movements/degrees of freedom that affect ‘k’.
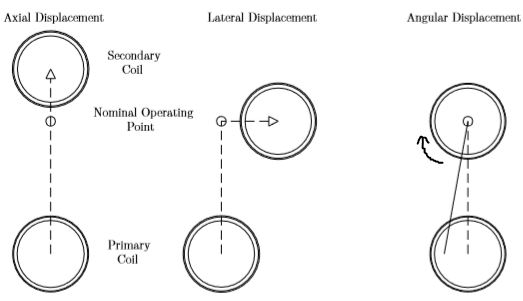
Figure 2 – Three different possible cases of displacement that affect coupling coefficient [1]
Holmstrøm [1] presented how a stable output power can be achieved either through relative position control between the two coils. He devised a feedback controller for servo-mechanism problem in which the reference signal (distance between coils) was continuously varying due to waves and other external forces (e.g: during loading/unloading of cars/bus). The distance affects coupling coefficient and as a consequence output power is lowered. This loss in power is compensated by raising the input primary current (see equation below at the expense of slightly decreased overall efficiency.
A second methodology is to use input frequency regulation which is discussed by Guidi and Suul [5].
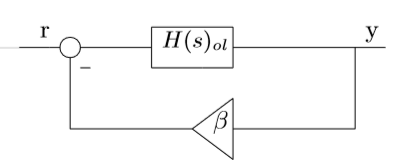
Figure 3 – Simple feedback control employed by Holstrøm [1]
IPT System Configuration
IPT systems exhibit two main types of configurations:
- Constant Resistance (CR)
- Constant Voltage (CV)
CR configuration is used when the load is purely resistive. Most of the IPT applications require a regulated, stable voltage to be supplied to battery for charging purposes. For those cases, CV configuration such as the one in Figure 4 is optimal.
Guidi and Suul [5] used constant voltage configuration and presented minimized converter requirements for IPT systems using series-series topology.
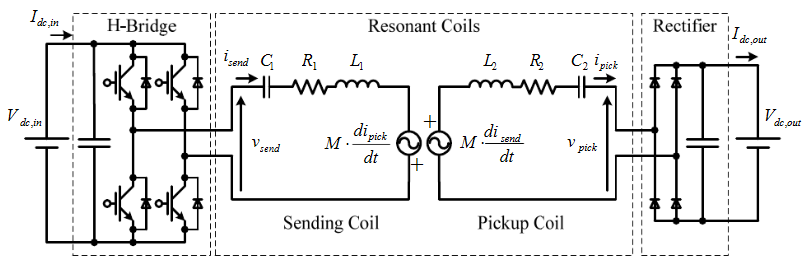
Figure 4 – Constant voltage (CV) configuration with series-series (SS) topology [5]
Topologies
The topology of an IPT system is the arrangement of the components in the system. The topology can be complex, but will usually be a combination of only four basic configurations. There are no clear best alternative, as each configuration have different advantages and drawbacks. The four basic ones are:
- Series-Series (SS)
- Series-Parallel (SP)
- Parallel-Series (PS)
- Parallel-Parallel (PP)
Figure 5 – Topologies for single-element impedance transformation network [6]
Correct topology is defined by the system constraints [7]. Series configuration on the primary side allows for a lower primary voltage, while a parallel configuration gives a high primary current. On the secondary side a series configuration gives stable voltage while a parallel setup gives a stable current [1].
SS topology is usually preferred for high power applications. In this topology resonant capacitors will impose a high voltage on the coils, which will reduce the required current rating of coils and capacitors compared to parallel combination. Furthermore, the SS topology allows for designing the system based on a standard H-bridge Voltage Source Converter (VSC) topology for driving the power transfer. In SS topology resonant frequency is not affected by the loading conditions and is rather insensitive to variations in the coupling conditions between the two coils [4].
Mathematical analysis for SS, SP and PP topologies can be sought out in [1] and [8]. A sort of similar analysis among all topologies has been performed by Martin & Vladimir [9] with regard to application in electric vehicles in which they studied the influence of different component values on coupling coefficient, power, efficiency etc.
Table 1 – Summary of different topologies [9]
| Effect | S-S | S-P | P-S | P-P |
|---|---|---|---|---|
| Influence of C1 on k | none | low | high | high |
| Influence of C1 on Rz | none | low | high | high |
| Rz for high efficiency | lower | higher | lower | higher |
| Maximal P2 | high | lower | low | low |
| Pmax and efficiency overlapping | no | no | partial | partial |
| Type of AC source | current | voltage | voltage | current |
They also conclude SS topology to be the most reliable for high power configurations. Graphical results may be viewed in the paper [9].
Low [6] et. al. developed a wireless power transfer system using class-E transmitter and provided a technical comparison with class-D transmitter. The circuit supplied output power of 295W at 75.7% efficiency with forced air cooling. In figure-5, different topologies of transformation network with single element are displayed. Multi-element transformation network may enhance the output power and efficiency but at the expense of large circuit size. In consideration of size and efficiency, they used capacitors instead of resistors and inductors for the network because resistors dissipate power and the size of a low-loss inductor is generally large.
Kim et. al. [10] presented 1MW IPT system for high speed train that was supposed to supply power in real-time without any battery charging. Its IPT system consists of a 1-MW resonant inverter, a 128 m long transmitter, 4 pickups including rectifiers and a wireless feedback network to maintain a constant output voltage of the pickups. The operating frequency of the system was set to 60 kHz (instead of 20kHz normally used for high power IPT applications) to achieve efficient power transfer. The measured efficiency of IPT system at 818 kW output power of the pickups for the 5 cm air gap was recorded as 82.7%.
Figure 6 – Block diagram for a 1 MW IPT system for trains
This IPT system consisted of:
- Transmitter
- Pickups
- Resonant Inverter (resonating at 60 kHz) – It acted as a high current source for transmitter coil so that voltage level at pickup coils may be enhanced
- Rectifier
- Wireless Feedback Network – For constant, regulated voltage supply
Generally, a regulator network is inserted in the power electronic circuitry of IPT systems to control voltage level, but in a high-power IPT systems it is necessary to eliminate the regulator because of the high cost, heavy weight and its large size [10].
Figure 7 – Original electrical system of train combined with IPT system
![]()
Figure 8 – Equivalent circuit of transmitter & pickups for a train
End results prove that the train successfully started and ran at a speed of 10 km/hr. [10]
Guidi et. al. [4], [11] proposed a practical implementation of an inductive charger with SS topology for Wärtsilä’s Folgefonn double-ended car ferry project with at least 1 MW power transfer capacity with ability to counter the distance variations between 15 cm – 50 cm. Sørfonn [11] presents general technical analysis about the same vessel and quotes it to be system designed for hybrid vessel but aims to develop strategy for complete plug-in electric vessel that will meet its total energy demand from on-shore connection, preferably a renewable energy connection.

Figure 9 – Wärtsilä concept ferry for zero-emission provided with inductive charging [11]
Rather than applying position control mechanism as theoretically explained by Holmstrøm [1], Guidi et. al. [4] didn’t use any such mechanism in Folgefonn to cater for distance variations between primary & secondary coils, instead they modified the coil design. They just employed components with minimal rating requirements to obtain simple system configuration with few components.
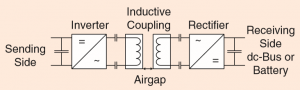
Figure 10 – SS topology used on Wärtsillä concept ferry Folgefonn
To counter the variations in up-down displacements for the vessel, they used a prolonged coil. Guidi et. al. [4] also suggest the use of combined voltage-frequency control to utilize bifurcation characteristics of IPT resonant circuits. (Calculations for bifurcation are also presented by Holmstrøm [1]).
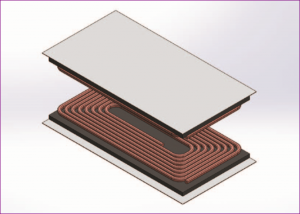
Figure 11 – Prolonged transfer & pickup coil [4]
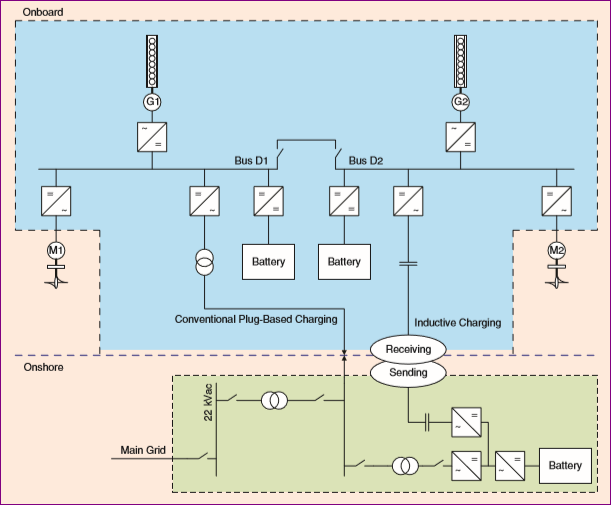
Figure 12 – Electrical system on the ferry Folgefonn
Conclusion and suggestions
The report covers possibly all the relevant and latest literature from the perspective of induction power transfer. Not much work has been done on high power applications (above 1MW). The selection of any topology is dependent upon the power considerations and efficiency requirements. For instance, small biomedical devices may tolerate a power loss of 10% — 30% but for large vessels even a power loss of 10% makes a significant impact. However, as per literature review, SS topology is preferred for high power applications as it is more insensitive to variations in primary capacitance, coupling coefficient etc.
Considering the Figure 10 where the sending side is DC bus, it is converted to AC and after induction AC is again converted back to DC for supplying power to load. Another scheme is available as presented by Sahraneshin [12] which uses cyclo-converter on the pick-up side of basic IPT circuit. This topology was practiced for motor drives with space vector modulation (SVM) for improving output voltage at secondary end by reducing Total Harmonics Distortion (THD).
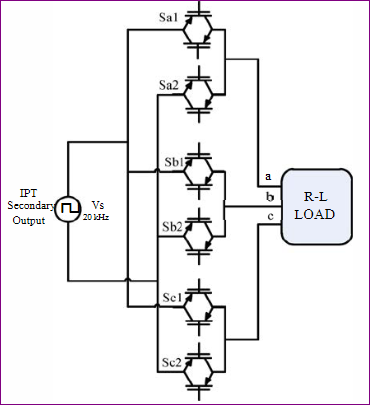
Figure 13 – Proposed topology for use in IPT secondary output
A similar topology may be devised for primary side where 3-phase, 60 Hz OR 1-phase, 60 Hz supply voltage be converted to 1-phase, high frequency (20kHz-70kHz) at the primary end of coil. And after induction the topology presented by Sahraneshin [12] be used.
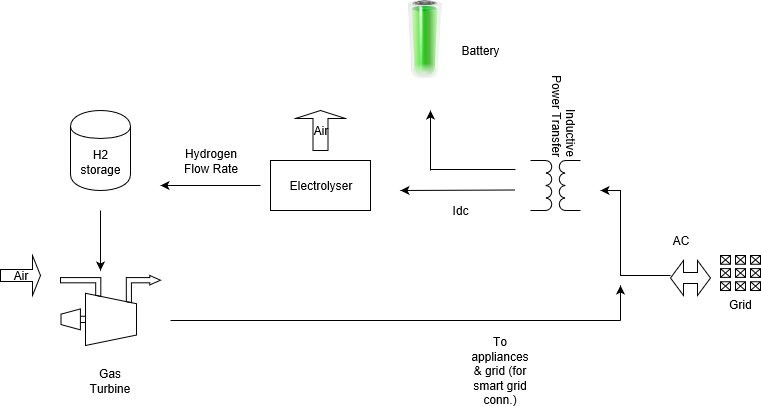
Another suggestion in my own thinking with regard to marine applications would be to use induction charging for charging batteries as well as for running an electrolyser. An electrolyser will break down water into hydrogen and oxygen. Both shall be stored. In case of low battery during the voyage, the stored hydrogen and oxygen (preferably air mixture) will be fed to gas turbine. The generated AC power may be used to propel the vessel as well as for switching ON the on-board electronics. In case of excess power it may be then used to supply back to grid (smart grid concept). The scheme is presented in the form of a rough block diagram in Figure 14.
References
| [1] | K. Holmstrøm, “Position Control in Inductive Power Transfer,” Norwegian University of Science and Technology, 2018. |
| [2] | D. A. A Brecher, ” Review and evaluation of wireless power transfer (WPT) for electric transit applications,” 2014. |
| [3] | R. Shadid and S. Noghanian, “A Literature Survey on Wireless Power Transfer for Biomedical Devices,” International Journal of Antennas and Propagation, 2018. |
| [4] | G. Guidi, J. A. Suul, F. Jenset and I. Sorfonn, “Wireless Charging for Ships: High-Power Inductive Charging for Battery Electric and Plug-In Hybrid Vessels,” IEEE Electrification Magazine, vol. 5, no. 3, pp. 22-32, 2017. |
| [5] | G. Guidi and J. A. Suul, “Minimizing Converter Requirements of Inductive Power Transfer Systems with Constant Voltage Load and Variable Coupling Conditions,” IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, 2016. |
| [6] | Z. N. Low, R. A. Chinga, R. Tseng and J. Lin, “Design and Test of a High-Power High-Efficiency Loosely Coupled Planar Wireless Power Transfer System,” IEEE Transactions on Industrial Electronics, vol. 56, no. 5, pp. 1801-1812, 2009. |
| [7] | R. L. Steigerwald, “A comparison of half-bridge resonant converter topologies,” IEEE Transaction on Power Electronics, 1988. |
| [8] | I.-G. Sîrbu and L. Mandache, “Comparative analysis of different topologies for wireless power transfer systems,” in IEEE International Conference on Environment and Electrical Engineering ; IEEE Industrial and Commercial Power Systems Europe (EEEIC / I&CPS Europe) , Milan, 2017. |
| [9] | M. Zavřel and V. Kindl, “Comparison of Various Configuration of Wireless Power Transfer System,” Transactions on Electrical Engineering, vol. 7, no. 2, 2018. |
| [10] | J. H. Kim et. al., “Development of 1-MW Inductive Power Transfer System for a High-Speed Train,” IEEE Transactions on Industrial Electronics, vol. 62, no. 10, pp. 6242-6250, 2015. |
| [11] | I. SØRFONN, “Hybrid technology for new emerging markets – inductive charging,” Wärtsilä Technical Journal, 2016. |
| [12] | S. Sahraneshin, M. Ameri and A. Y. Varjani, “A single to three-phase AC/AC cycloconverter for Inductive Power Transfer,” in Power Electronics, Drive Systems and Technologies Conference (PEDSTC), 2013. |


